引擎
Docker由以下主要组件组成:Docker客户端(Docker Client)、Docker守护进程(Docker Daemon)、containerd以及runc。他们共同负责容器的创建和运行。
Docker daemon是单一的二进制文件,包含诸如Docker客户端、Docker API、容器运行时、镜像构建等。
容器
容器和虚拟机的区别
虚拟机:在虚拟机模型中,首先要开启物理机并启动Hypervisor引导程序。一旦Hypervisor启动,就会占有机器上的全部物理资源,如CPU、RAM、存储和NIC。Hypervisor接下来就会将这些物理资源划分为虚拟资源,并且看起来与真实物理资源完全一致。然后Hypervisor会将这些资源打包进一个叫作虚拟机(VM)的软件结构当中。这样用户就可以使用这些虚拟机,并在其中安装操作系统和应用。
容器:服务器启动之后,所选择的操作系统会启动。在Docker世界中可以选择Linux,或者内核支持内核中的容器原语的新版本Windows。与虚拟机模型相同,OS也占用了全部硬件资源。在OS层之上,需要安装容器引擎(如Docker)。容器引擎可以获取系统资源 ,比如进程树、文件系统以及网络栈,接着将资源分割为安全的互相隔离的资源结构,称之为容器。每个容器看起来就像一个真实的操作系统,在其内部可以运行应用。
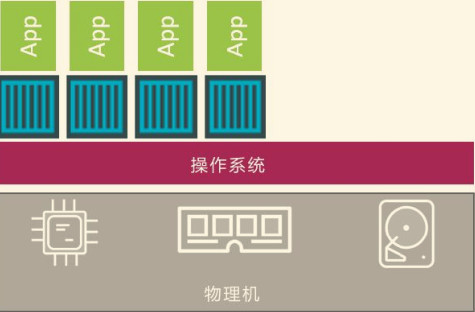
从更高层面上来讲,Hypervisor是硬件虚拟化(Hardware Virtualization)——Hypervisor将硬件物理资源划分为虚拟资源;另外,容器是操作系统虚拟化(OS Virtualization) ——容器将系统资源划分为虚拟资源。
通常建议在运行容器时配置好重启策略。这是容器的一种自我修复能力,可以在指定事件或者错误后重启来完成自我修复。
生产环境中的多阶段构建
多阶段构建方式使用一个Dockerfile,其中包含多个FROM 指令。每一个FROM指令都是一个新的构建阶段(Build Stage) ,并且可以方便地复制之前阶段的构件。
一旦有指令在缓存中未命中(没有该指令对应的镜像层),则后续的整个构建过程将不再使用缓存。在编写Dockerfile时须特别注意这一点,尽量将易于发生变化的指令置于Dockerfile文件的后方执行。这意味着缓存未命中的情况将直到构建的后期才会出现——从而构建过程能够尽量从缓存中获益。
Docker Compose
Docker Compose的前身是Fig。Fig是一个由Orchard公司开发的强有力的工具,在当时是进行多容器管理的最佳方案。Fig是一个基于Docker的Python工具,允许用户基于一个YAML文件定义多容器应用,从而可以使用fig 命令行工具进行应用的部署。Fig还可以对应用的全生命周期进行管理。内部实现上,Fig会解析YAML文件,并通过Docker API进行应用的部署和管理。这种方式相当不错!
Docker Compose使用YAML文件来定义多服务的应用。YAML是JSON的一个子集,因此也可以使用JSON。
docker-compose up 命令用于部署一个Compose应用。
docker-compose stop 命令会停止Compose应用相关的所有容器,但不会删除它们。
docker-compose rm 命令用于删除已停止的Compose应用。它会删除容器和网络,但是不会删除卷和镜像。
docker-compose restart 命令会重启已停止的Compose应用。
Docker Swarm
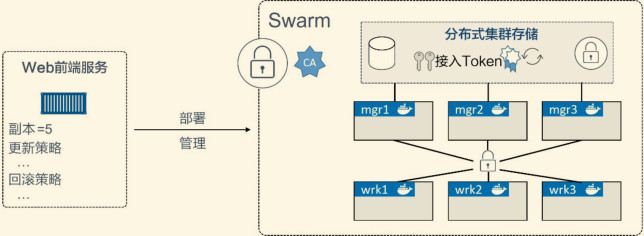
集群角度来说,一个Swarm由一个或多个Docker节点组成。这些节点可以是物理服务器、虚拟机、树莓派(Raspberry Pi)或云实例。唯一的前提就是要求所有节点通过可靠的网络相连。
节点会被配置为管理节点(Manager)或工作节点(Worker)。管理节点负责集群控制面(Control Plane),进行诸如监控集群状态、分发任务至工作节点等操作。工作节点接收来自管理节点的任务并执行。
Swarm的配置和状态信息保存在一套位于所有管理节点上的分布式etcd数据库中。该数据库运行于内存中,并保持数据的最新状态。关于该数据库最棒的是,它几乎不需要任何配置——作为Swarm的一部分被安装,无须管理
Swarm使用TLS进行通信加密、节点认证和角色授权。自动密钥轮换(Automatic Key Rotation)更是锦上添花!其在后台默默进行,用户甚至感知不到这一功能的存在!
关于应用编排,Swarm中的最小调度单元是服务。它是随Swarm引入的,在API中是一个新的对象元素,它基于容器封装了一些高级特性,是一个更高层次的概念。
当容器被封装在一个服务中时,我们称之为一个任务或一个副本,服务中增加了诸如扩缩容、滚动升级以及简单回滚等特性。
搭建集群
在单引擎模式下的Docker主机上运行docker swarm init 会将其切换到Swarm模式,并创建一个新的Swarm,将自身设置为Swarm的第一个管理节点。
更多的节点可以作为管理节点或工作节点加入进来。这一操作也会将新加入的节点切换为 Swarm模式。
Swarm模式下的操作默认运行于2337端口。虽然它是可配置的,但2377/tcp是用于客户端与Swarm进行安全(HTTPS)通信的约定俗成的端口配置。
Swarm的管理节点内置有对HA的支持。这意味着,即使一个或多个节点发生故障,剩余管理节点也会继续保证Swarm的运转。从技术上来说,Swarm实现了一种主从方式的多管理节点的HA。这意味着,即使你可能——并且应该——有多个管理节点,也总是仅有一个节点处于活动状态。通常处于活动状态的管理节点被称为“主节点”(leader),而主节点也是唯一一个会对Swarm发送控制命令的节点。
Swarm使用了Raft共识算法的一种具体实现来支持管理节点的HA。关于HA,以下是两条最佳实践原则。
- 部署奇数个管理节点。
- 不要部署太多管理节点(建议3个或5个)。
部署奇数个管理节点有利于减少脑裂(Split-Brain)情况的出现机会。对于所有的共识算法来说,更多的参与节点就意味着需要花费更多的时间来达成共识。
Swarm集群内置有繁多的安全机制,并提供了开箱即用的合理的默认配置——如CA设置、接入Token、公用TLS、加密集群存储、加密网络、加密节点ID等。
Swarm服务
使用服务仍能够配置大多数熟悉的容器属性,比如容器名、端口映射、接入网络和镜像。此外还增加了额外的特性,比如可以声明应用服务的期望状态,将其告知Docker后,Docker会负责进行服务的部署和管理。
使用docker service create 命令创建一个新的服务。Swarm 会在后台进行轮训检查(Reconciliation Loop),来持续比较服务的实际状态和期望状态是否一致。如果一致,则皆大欢喜,无须任何额外操作;如果不一致,Swarm会使其一致。
使用docker service ls 命令可以查看Swarm中所有运行中的服务。
服务的默认复制模式(Replication Mode)是副本模式(replicated )。这种模式会部署期望数量的服务副本,并尽可能均匀地将各个副本分布在整个集群中。
另一种模式是全局模式(global ),在这种模式下,每个节点上仅运行一个副本。
docker service create 命令传递–mode global 参数部署一个全局服务。
docker service scale 命令即可对服务进行扩容。
docker service rm 命令可用于删除之前部署的服务。
docker service update 命令用于对运行中的服务的属性进行变更。
docker service logs 命令用于查看服务的日志。
Docker网络
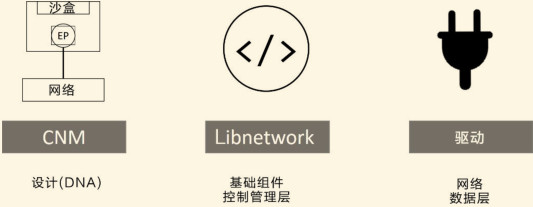
在顶层设计中,Docker网络架构由3个主要部分构成:CNM、Libnetwork和驱动。
CNM是设计标准。在CNM中,规定了Docker网络架构的基础组成要素。
Libnetwork是CNM的具体实现,并且被Docker采用。Libnetwork通过Go语言编写,并实现了CNM中列举的核心组件。
驱动通过实现特定网络拓扑的方式来拓展该模型的能力。
CNM
CNM定义了3个基本要素:沙盒(Sandbox)、终端(Endpoint)和网络(Network)
- 沙盒是一个独立的网络栈。其中包括以太网接口、端口、路由表以及DNS配置。
- 终端就是虚拟网络接口。就像普通网络接口一样,终端主要职责是负责创建连接。在CNM中,终端负责将沙盒连接到网络。
- 网络是802.1d网桥(类似大家熟知的交换机)的软件实现。因此,网络就是需要交互的终端的集合,并且终端之间相互独立。
Libnetwork
CNM是设计规范文档,Libnetwork是标准的实现。Libnetwork是开源的,采用Go语言编写,它跨平台(Linux以及Windows),并且被Docker所使用。
Libnetwork实现了CNM中定义的全部3个组件。此外它还实现了本地服务发现(Service Discovery)、基于Ingress的容器负载均衡,以及网络控制层和管理层功能。
驱动
如果说Libnetwork实现了控制层和管理层功能,那么驱动就负责实现数据层
单机桥接网络
- 单机意味着该网络只能在单个Docker主机上运行,并且只能与所在Docker主机上的容器进行连接
- 桥接意味着这是802.1.d桥接的一种实现(二层交换机)。
Linux Docker创建单机桥接网络采用内置的桥接驱动,而Windows Docker创建时使用内置的NAT驱动。实际上,这两种驱动工作起来毫无差异。
服务发现
服务发现(Service Discovery) 允许容器和Swarm服务通过名称互相定位。唯一的要求就是需要处于同一个网络当中。其底层实现是利用了Docker内置的DNS服务器,为每个容器提供DNS解析功能。
Ingress网络
Swarm支持两种服务发布模式,两种模式均保证服务从集群外可访问。
- Ingress模式(默认):通过Ingress模式发布的服务,可以保证从Swarm集群内任一节点(即使没有运行服务的副本)都能访问该服务;
- Host模式:以Host模式发布的服务只能通过运行服务副本的节点来访问
在底层,Ingress模式采用名为Service Mesh 或者Swarm Mode Service Mesh的四层路由网络来实现。
docker network ls 用于列出运行在本地Docker主机上的全部网络。
docker network create 创建新的Docker网络。
docker network inspect 提供Docker网络的详细配置信息。
docker network prune 删除Docker主机上全部未使用的网络。
docker network rm 删除Docker主机上指定网络。
Docker覆盖网络
在Swarm模式下构建并测试Docker覆盖网络
构建Swarm
首先需要将两台主机配置为包含两个节点的Swarm集群。接下来会在node1节点上运行docker swarm init 命令使其成为管理节点,然后在node2节点上运行docker swarm join 命令来使其成为工作节点。
创建新的覆盖网络
docker network create -d overlay 创建了一个崭新的覆盖网络,能连接Swarm集群内的所有主机,并且该网络还包括一个TLS加密的控制层!如果还想对数据层加密的话,只需在命令中增加-o encrypted 参数。
将服务连接到覆盖网络
docker service create 连接到了覆盖网络,并且还基于指定的镜像创建了两个副本(容器)。
覆盖网络工作原理
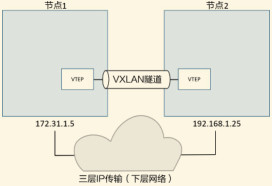
VXLAN
Docker使用VXLAN隧道技术创建了虚拟二层覆盖网络。在VXLAN的设计中,允许用户基于已经存在的三层网络结构创建虚拟的二层网络。
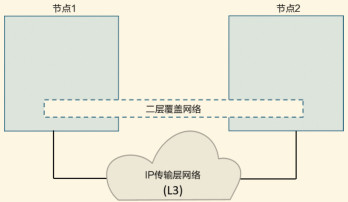
VXLAN的美妙之处在于它是一种封装技术,能使现存的路由器和网络架构看起来就像普通的IP/UDP包一样,并且处理起来毫无问题。为了创建二层覆盖网络,VXLAN基于现有的三层IP网络创建了隧道。
VXLAN隧道两端都是VXLAN隧道终端(VXLAN Tunnel Endpoint, VTEP)。VTEP完成了封装和解压的步骤,以及一些功能实现所必需的操作
docker network create 是创建新网络所使用的命令。
docker network ls 用于列出Docker主机上全部可见的容器网络。
docker network inspect 用于查看特定容器网络的详情。
docker network rm 删除指定网络。
卷与持久化数据
如果希望自己的容器数据保留下来(持久化),则需要将数据存储在卷上。卷与容器是解耦的,从而可以独立地创建并管理卷,并且卷并未与任意容器生命周期绑定。最终效果即用户可以删除一个关联了卷的容器,但是卷并不会被删除。
容器与非持久数据
容器擅长无状态和非持久化事务。每个容器都被自动分配了本地存储。默认情况下,这是容器全部文件和文件系统保存的地方。
默认情况下,容器的所有存储都使用本地存储。所以默认情况下容器全部目录都是用该存储。
容器与持久化数据
在容器中持久化数据的方式推荐采用卷。总体来说,用户创建卷,然后创建容器,接着将卷挂载到容器上。卷会挂载到容器文件系统的某个目录之下,任何写到该目录下的内容都会写到卷中。即使容器被删除,卷与其上面的数据仍然存在。
Docker中卷属于一等公民。抛开其他原因,这意味着卷在API中拥有一席之地,并且有独立的docker volume 子命令。
在集群节点间共享存储
Docker能够集成外部存储系统,使得集群间节点共享外部存储数据变得简单。例如,独立存储LUN或者NFS共享可以应用到多个Docker主机,因此无论容器或者服务副本运行在哪个节点上,都可以共享该存储。
不过这种配置需要关注数据损坏问题
docker volume create 命令用于创建新卷。
docker volume ls 会列出本地Docker主机上的全部卷。
docker volume inspect 用于查看卷的详细信息。
docker volume prune 会删除未被容器或者服务副本使用的全部卷。
docker volume rm 删除未被使用的指定卷。
Docker Stack
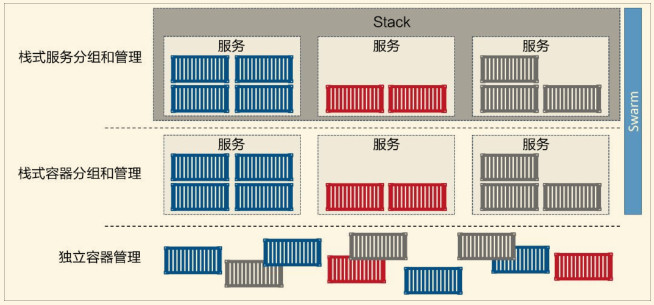
如果了解Docker Compose,就会发现Docker Stack非常简单。事实上在许多方面,Stack一直是期望的Compose——完全集成到Docker中,并能够管理应用的整个生命周期。
从体系结构上来讲,Stack位于Docker应用层级的最顶端。Stack基于服务进行构建,而服务又基于容器
默认情况下,覆盖网络的所有控制层都是加密的。如果需要加密数据层,有两种选择
- 在docker network create 命令中指定-o encrypted 参数。
- 在Stack文件中的driver_opts 之下指定encrypted:’yes’ 。
数据层加密会导致额外开销,而影响额外开销大小的因素有很多,比如流量的类型和流量的多少。但是,通常额外开销会在10%的范围之内。
Stack是一组相关联的服务和基础设施,需要进行统一的部署和管理。Stack是由普通的Docker资源构建而来:网络、卷、密钥、服务等。这意味着可以通过普通的Docker命令对其进行查看和重新配置
所有应用/Stack都应采用该方式进行更新。所有的变更都应该通过Stack文件进行声明,然后通过 docker stack deploy 进行部署 。
docker stsack deploy 用于根据Stack文件(通常是docker-stack.yml )部署和更新Stack服务的命令
docker stack ls 会列出Swarm集群中的全部Stack,包括每个Stack拥有多少服务。
docker stack ps 列出某个已经部署的Stack相关详情。
docker stack rm 命令用于从Swarm集群中移除Stack。
Docker安全
安全本质就是分层!通俗地讲,拥有更多的安全层,就能拥有更多的安全性。而Docker提供了很多安全层。
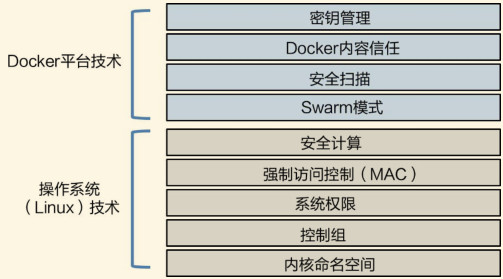
Docker的原生安全技术:
- ***Docker Swarm模式:***默认是开启安全功能的。无须任何配置,就可以获得加密节点ID、双向认证、自动化CA配置、自动证书更新、加密集群存储、加密网络等安全功能。
- ***Docker内容信任(Docker Content Trust, DCT):***允许用户对镜像签名,并且对拉取的镜像的完整度和发布者进行验证。
- ***Docker安全扫描(Docker Security Scanning):***分析Docker镜像,检查已知缺陷,并提供对应的详细报告。
- ***Docker密钥:***使安全成为Docker生态系统中重要的一环。Docker密钥存储在加密集群存储中,在容器传输过程中实时解密,使用时保存在内存文件系统,并运行了一个最小权限模型。
Linux安全技术
每个优秀的容器平台都应该使用命名空间和控制组技术来构建容器。最佳的容器平台还会集成其他容器安全技术,例如系统权限、强制访问控制系统(如SELinux和AppArmor)以及安全计算。
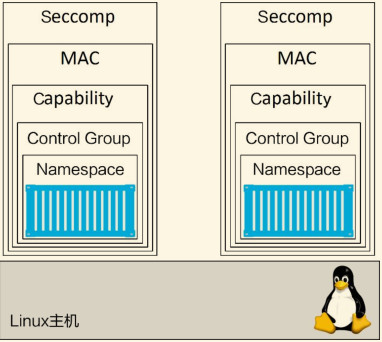
Namespace
内核命名空间属于容器中非常核心的一部分! 该技术能够将操作系统(OS)进行拆分,使一个操作系统看起来像多个互相独立的操作系统一样。
Docker容器是由各种命名空间组合而成的 。Docker容器本质就是命名空间的有组织集合 。
Docker是如何使用每个命名空间:
- 进程ID命名空间:Docker使用PID 命名空间为每个容器提供互相独立的容器树。每个容器都拥有自己的进程树,意味着每个容器都有自己的PID为1的进程。PID命名空间也意味着容器不能看到其他容器的进程树,或者其所在主机的进程树。
- 网络命名空间:Docker使用NET 命名空间为每个容器提供互相隔离的网络栈。网络栈中包括接口、ID地址、端口地址以及路由表。例如,每个容器都有自己的eth0网络接口,并且有自己独立的IP和端口地址。
- 挂载点命名空间:每个容器都有互相隔离的根目录/ 。这意味着每个容器都有自己的/etc 、/var 、/dev 等目录。容器内的进程不能访问Linux主机上的目录,或者其他容器的目录,只能访问自己容器的独立挂载命名空间。进程内通信命名空间:Docker使用IPC 命名空间在容器内提供共享内存。IPC 提供的共享内存在不同容器间也是互相独立的。
- 用户命名空间:Docker允许用户使用USER 命名空间将容器内用户映射到Linux主机不同的用户上。常见的例子就是将容器内的root 用户映射到Linux主机的非root用户上。用户命名空间对于Docker来说还属于新生事物且非必选项。该部分内容在未来可能出现改变。
- TS命名空间:Docker使用UTS 命名空间为每个容器提供自己的主机名称。
Control Group
如果说命名空间用于隔离,那么控制组就是用于限额。
Capability
在底层,Linux root用户是由许多能力组成的。其中一部分包括以下几点。
- CAP_CHOWN :允许用户修改文件所有权。
- CAP_NET_BIND_SERVICE :允许用户将socket绑定到系统端口号。
- CAP_SETUID :允许用户提升进程优先级。
- CAP_SYS_BOOT :允许用户重启系统。
Docker采用Capability机制来实现用户在以root身份运行容器的同时,还能移除非必须的root能力。如果容器运行只需要root的绑定系统网络端口号的能力,则用户可以在启动容器的同时移除全部root能力,然后再将CAP_NET_BIND_SERVICE能力添加回来。
MAC
Docker采用主流Linux MAC技术,例如AppArmor以及SELinux。
Docker允许用户在启动容器的时候不设置相应策略,还允许用户根据需求自己配置合适的策略。
Seccomp
Docker使用过滤模式下的Seccomp来限制容器对宿主机内核发起的系统调用。
用户同样可以自定义Seccomp配置,同时也可以通过向Docker传递指定参数,使Docker启动时不设置任何Seccomp配置。
Docker基本支持所有的Linux重要安全技术,同时对其进行封装并赋予合理的默认值,这在保证了安全的同时也避免了过多的限制
Docker平台安全技术
Swarm模式
Swarm模式支持用户集群化管理多个Docker主机,同时还能通过声明式的方式部署应用。每个Swarm都由管理者和工作者节点构成,节点可以是Linux或者Windows。管理者节点构成了集群中的控制层,并负责集群配置以及工作负载的分配。工作者节点就是运行应用代码的容器。
Swarm安全特性包括以下几点:
- 加密节点ID。
- 基于TLS的认证机制。
- 安全准入令牌。
- 支持周期性证书自动更新的CA配置。
- 加密集群存储(配置DB)。
- 加密网络。
Docker安全扫描
Docker安全扫描对Docker镜像进行二进制代码级别的扫描,对其中的软件根据已知缺陷数据库(CVE数据库)进行检查。在扫描执行完成后,会生成一份详细报告。
Docker内容信任
Dockr内容信任(Docker Content Trust,DCT)使得用户很容易就能确认所下载镜像的完整性以及其发布者。在不可信任的网络环境中下载镜像时,这一点很重要。
Docker密钥
Docker将密钥变成Docker生态系统中的一等公民。

